Hongliang Lu

Welcome to my personal homepage! My name is Lu Hongliang (卢红亮), and I am a third-year M.E. student in Mechanical Engineering at the College of Engineering, Peking University, advised by Prof. Zaiwen Wen. I received my B.E. degree in Robotics Engineering from Peking University in 2023.
My research centers on the synergy between Reinforcement Learning and Large Language Models, focusing on three key directions:
-
RL for LLMs: Developing data-efficient reinforcement learning algorithms to enhance post-training effectiveness, aiming to improve model performance and alignment with human preferences;
-
Agentic RL: Designing novel RL methods to advance autonomous agent capabilities, with a particular emphasis on self-evolving mechanisms that push the boundaries of agent performance through continuous self-improvement and autonomous capability scaling;
-
LLMs for Optimization: Leveraging the reasoning capabilities of large language models to tackle complex optimization modeling and decision-making problems.
I have interned at two leading AI companies. At Alibaba’s QuarkLLM team (May to September 2025), I contributed to the Deep Search project, designing RL algorithms to strengthen the Deep Search agent’s performance on tasks requiring multi-step reasoning and complex retrieval. Previously, at Moonshot AI (January to May 2025), I worked on data synthesis and RL training for their WebAgent.
news
| May 01, 2026 | Our paper “Constructing Industrial-Scale Optimization Modeling Benchmark” has been accepted to ICML 2026! 🎉 |
|---|---|
| Jan 28, 2026 | Our paper “Search Self-Play: Pushing the Frontier of Agent Capability without Supervision” has been accepted to ICLR 2026! 🎉 |
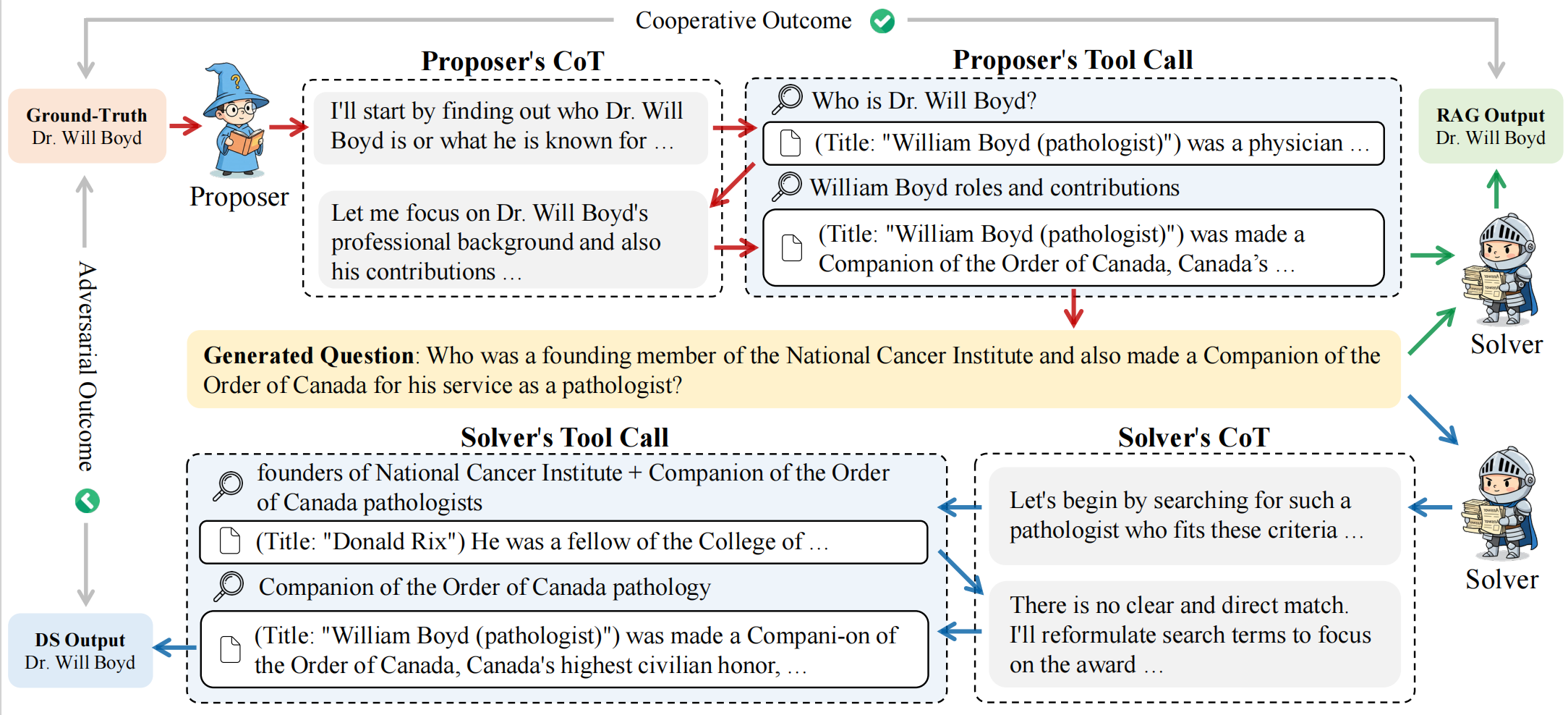
| Oct 22, 2025 | We are excited to release our latest research work in Agentic RL: “Search Self-Play: Pushing the Frontier of Agent Capability without Supervision”! 🚀 The paper has been submitted to ICLR 2026 and explores novel self-play training methods for enhancing agent capabilities without supervision. |
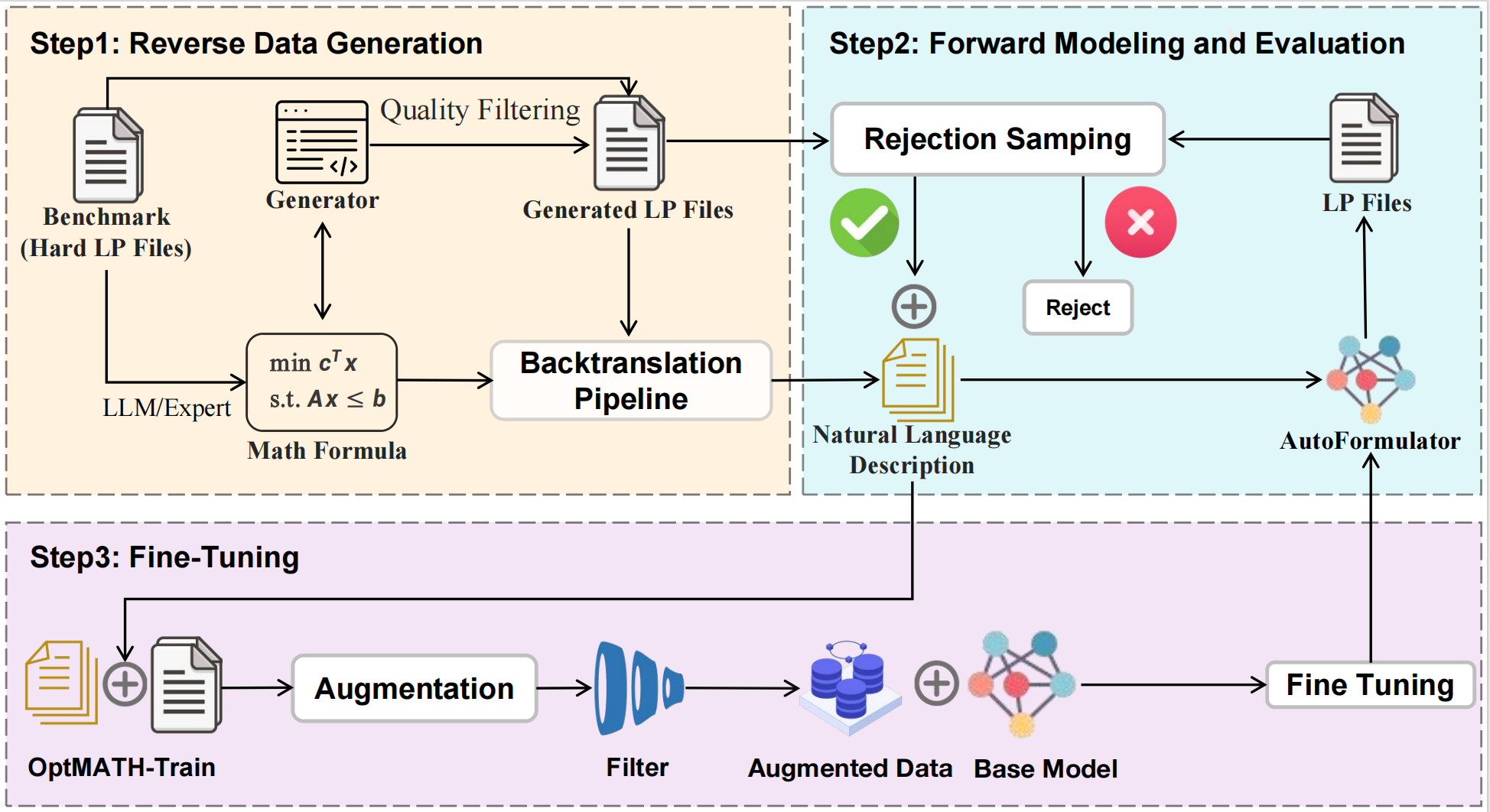
| May 01, 2025 | Our paper “OptMATH: A Scalable Bidirectional Data Synthesis Framework for Optimization Modeling” has been accepted as a poster presentation at ICML 2025! 🎉 |
education

Peking University
2023 — 2026 Peking University
2019 — 2023experience
Alibaba Group
Mar 2026 — Jun 2026Alibaba Group
May 2025 — Sep 2025Moonshot AI
Jan 2025 — May 2025selected publications
latest posts
| May 16, 2026 | OPD: Mathematical Foundations |
|---|---|
| May 16, 2026 | A Deep Dive into OPD |
| Mar 22, 2026 | A Deep Dive into OpenClaw |